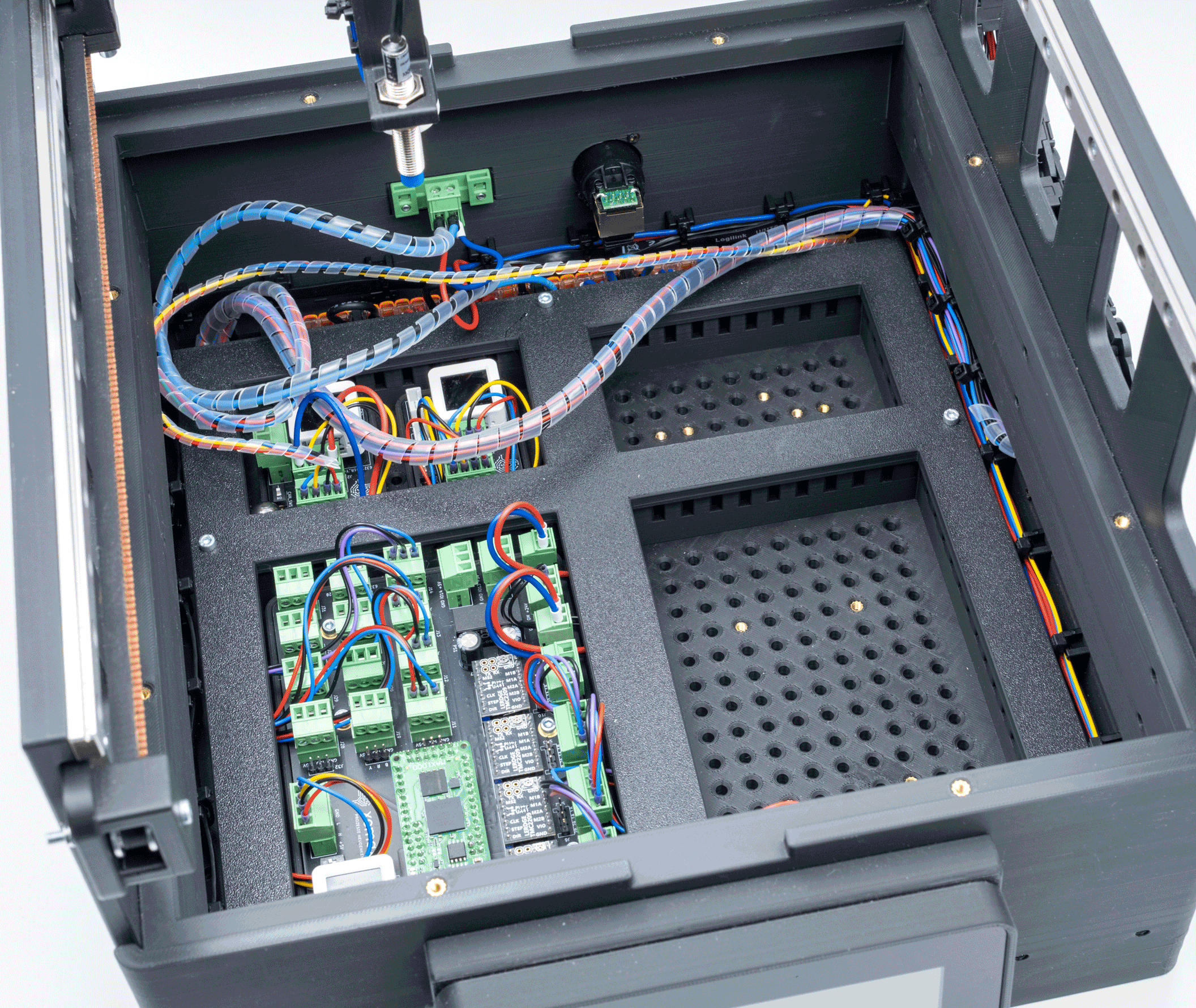
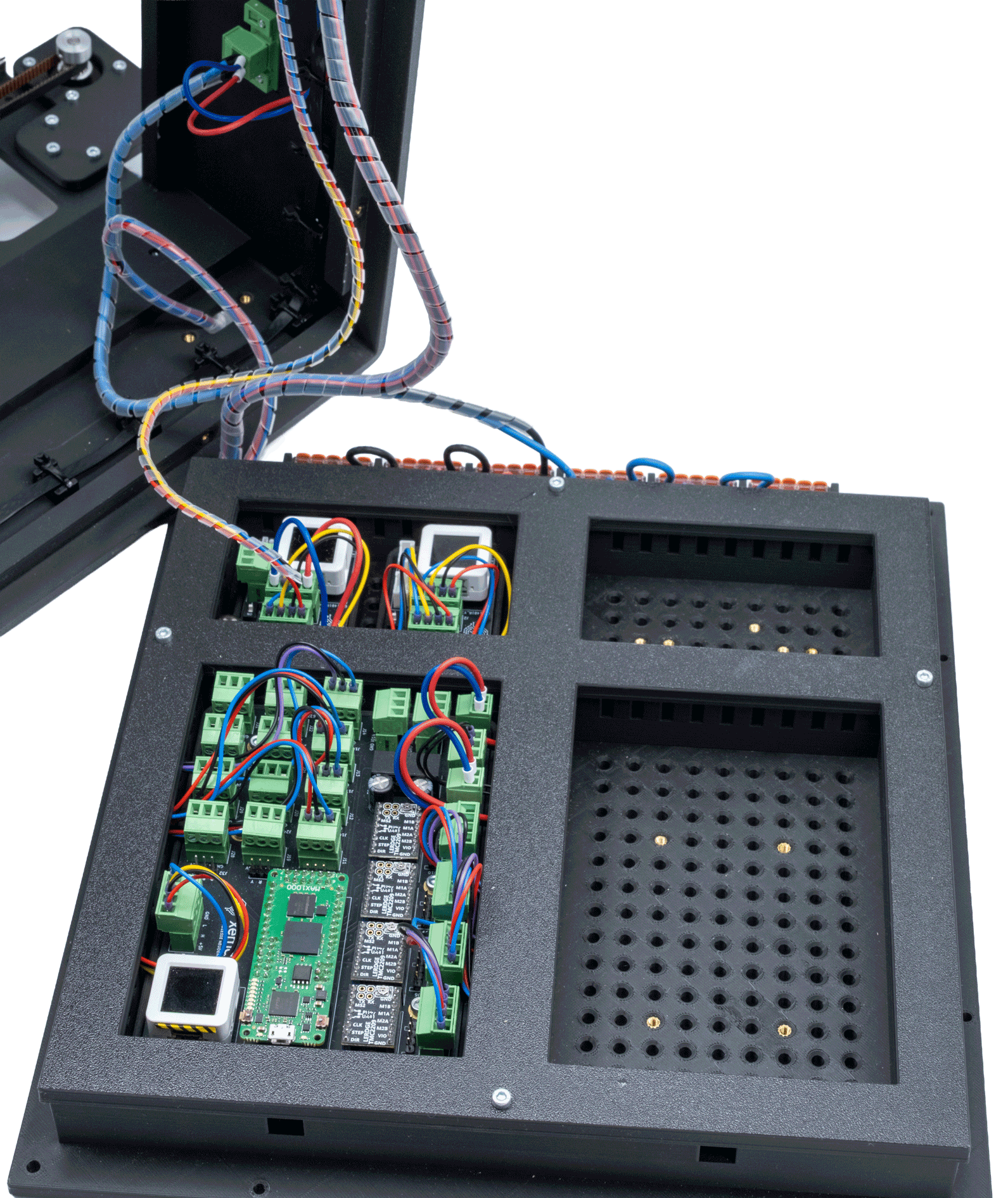
Motion Control
- Modularer Aufbau
- Programmierung auf der Basis der genormten Motion-Control-Bibliothen
PLCopen
- Portabel und somit standorunabhängig
- Fokus auf didaktischem Einsazt
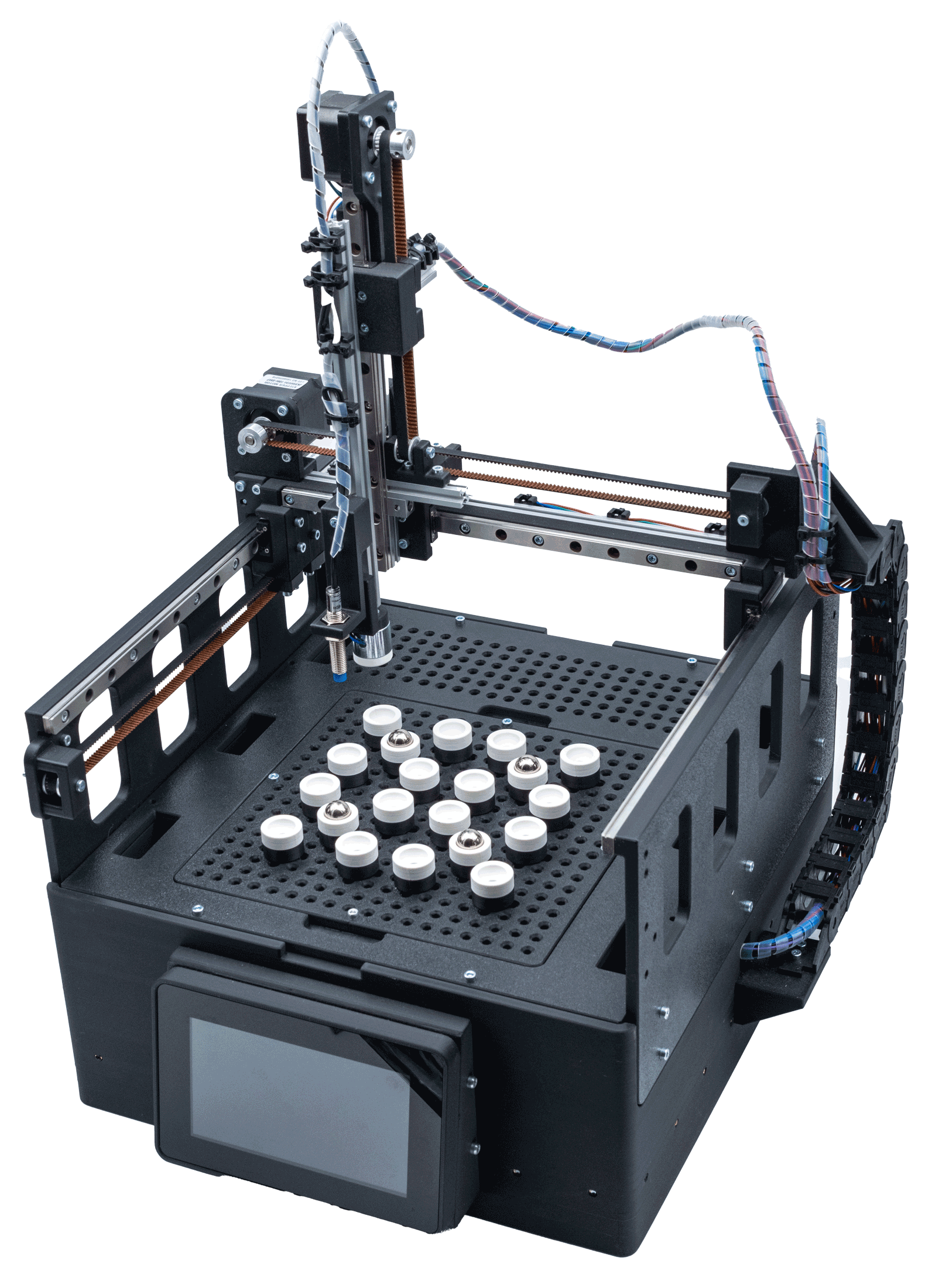
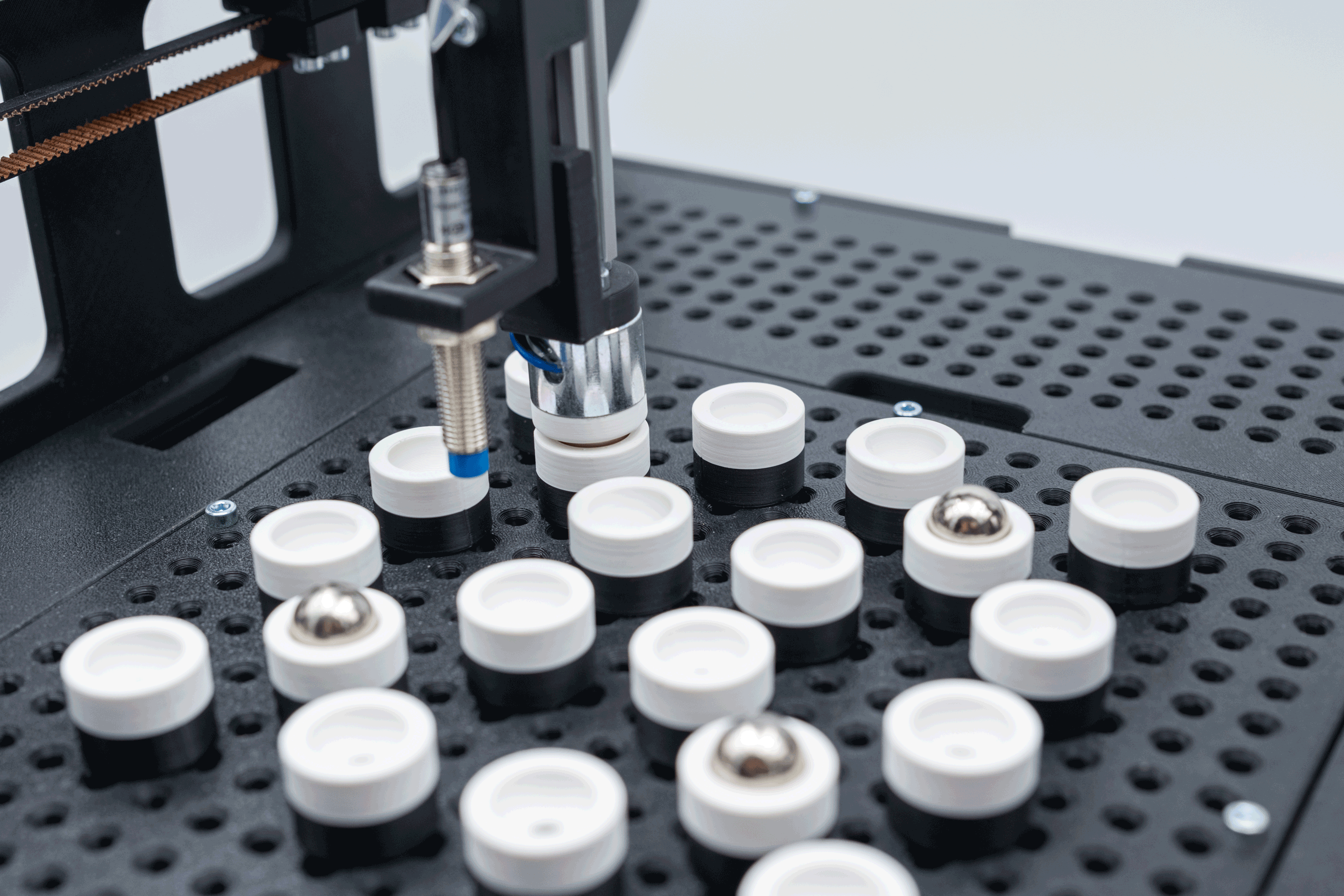
Exemplarische Demonstration einer Pick & Place Applikation.
GitHub Applikation Gantry DemoAktueller Entwicklungsstand
Die Produktelancierung wird auf Q3 2026 angestrebt. Der angestrebte Aufbau ist anhand der CAD-Zeichnungen ersichtlich.
Konzeptstudie Motion Control
Im Rahmen einer Diplomarbeit HF wurden die Möglichkeiten im Bereich Motion Control und Robotik untersucht. Die Ergebnisse dieser Arbeit werden im Promotionsvideo zur Diplomarbeit anschaulich präsentiert.